|
TIM2を使用し1ms 周期のPWMを作成します。 |
|||||||||
|
|
|||||||||
|
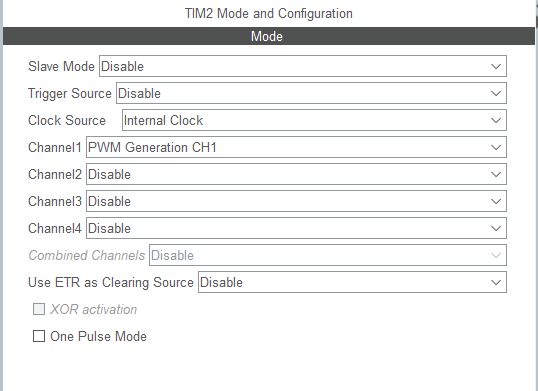
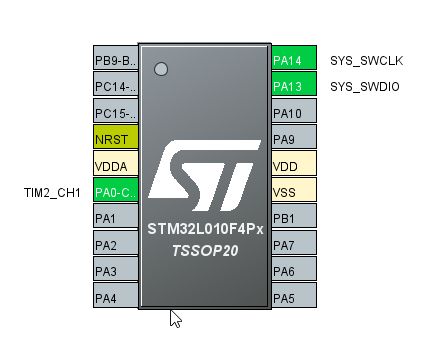
1.1. TIM2の設定 Timers内TIM2を選択し、Mode を以下の様に設定します。
  |
|||||||||
Parameter Settingsを以下の様に設定します。
|
|||||||||
|
上記設定でPWMの周期を決めます。 system clock = 32MHzなので、Prescalerで1/32としてTIM2のクロックソースを1MHzに設定。 Counter Periodを1000カウントとすることで周期を1msとします。 Prescalerへの設定値は分周値-1とします。 Counter Periodの設定値も-1した値とします。 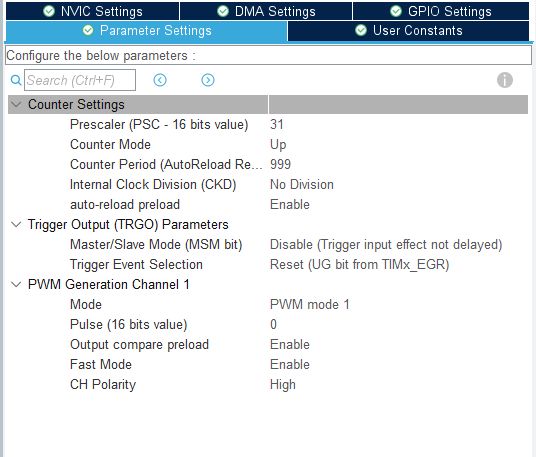 |
|||||||||
|
1.2. 割込みの設定 NVIC Interrupt Tableを選択しEnabledにチェックを入れます。その後、Code Generateを実行。  |
|||||||||
|
|
|||||||||
|
USER CODE BEGIN PVの下に外部変数を追加します。 ここでは uint32_t g_uwDutyとします。 /* Private variables ---------------------------------------------------------*/ TIM_HandleTypeDef htim2; /* USER CODE BEGIN PV */ uint32_t g_uwDuty=0; /* USER CODE END PV */ |
|||||||||
USER CODE BEGIN 2の下に。HAL_TIM_PWM_Start_ITを記述します。/* Initialize all configured peripherals */ MX_GPIO_Init(); MX_TIM2_Init(); /* USER CODE BEGIN 2 */ HAL_TIM_PWM_Start_IT(&htim2, TIM_CHANNEL_1); /* USER CODE END 2 */ |
|||||||||
|
USER CODE BEGIN 4の下に割込み処理関数を記述します。 関数名はHAL_TIM_PWM_PulseFinishedCallback固定です。 g_uwDuty を変化させ、10%ステップでDuty Cycleを変更します。
/* USER CODE BEGIN 4 */
void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim)
{
g_uwDuty += 100;
__HAL_TIM_SET_COMPARE(htim, TIM_CHANNEL_1, (g_uwDuty - 1) % 1000);
}
/* USER CODE END 4 */
|
|||||||||
|
|
|||||||||
実行すると以下のような波形が発生します。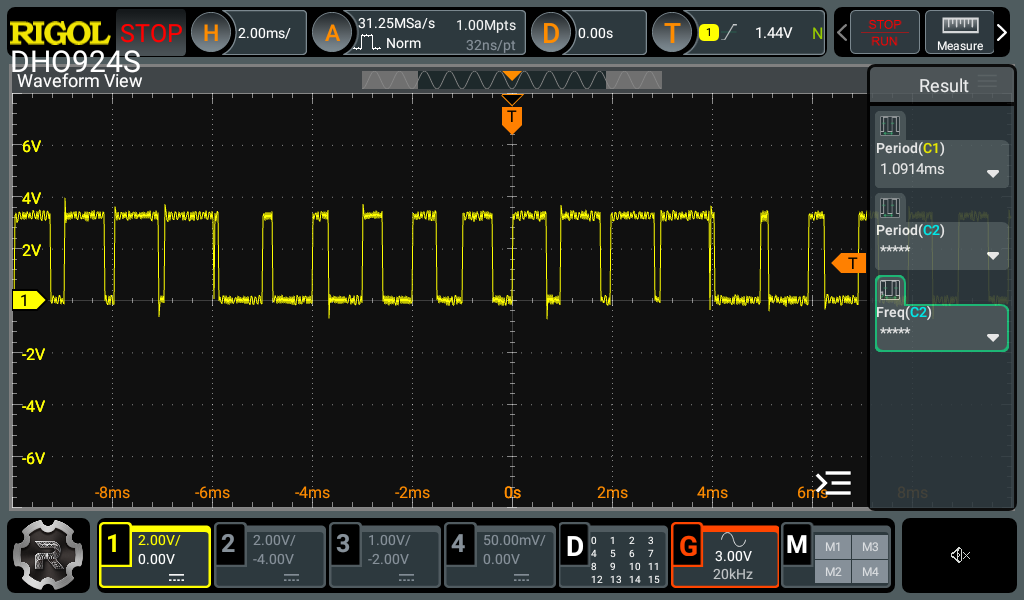 |
|||||||||
|
次にPWMのDuty比を最大・最小値で交互に切り替えてみましょう。 計測しやすいようにCounter Periodを15に設定します。 次にHAL_TIM_PWM_PulseFinishedCallbackを以下の様に変更します。
/* USER CODE BEGIN 4 */
void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim)
{
// g_uwDuty += 100;
// __HAL_TIM_SET_COMPARE(htim, TIM_CHANNEL_1, (g_uwDuty - 1) % 1000);
g_uwDuty++;
__HAL_TIM_SET_COMPARE(htim, TIM_CHANNEL_1, g_uwDuty & 1 ? 1 : 14);
}
/* USER CODE END 4 */
|
|||||||||
|
実行すると以下のような波形が発生します。 正しく動作しないことがわかります。 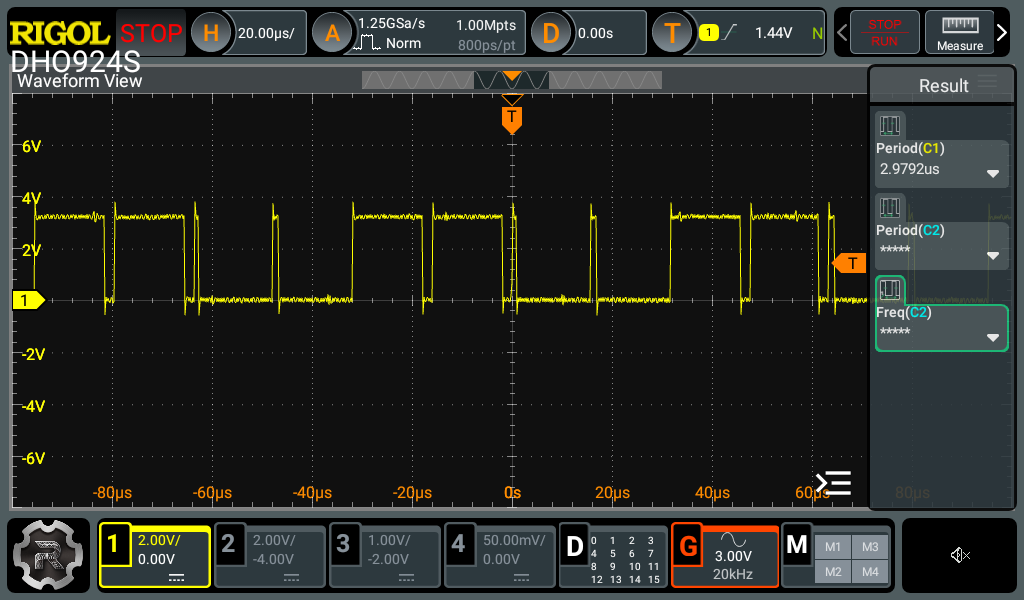 |
|||||||||
|
ここで割込み種別を変更します。 割込みをCC1からUPDATEに変更します。 /* USER CODE BEGIN 2 */ HAL_TIM_PWM_Start_IT(&htim2, TIM_CHANNEL_1); __HAL_TIM_DISABLE_IT(&htim2, TIM_IT_CC1); __HAL_TIM_ENABLE_IT(&htim2, TIM_IT_UPDATE); /* USER CODE END 2 */
/* USER CODE BEGIN 4 */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
g_uwDuty++;
__HAL_TIM_SET_COMPARE(htim, TIM_CHANNEL_1, g_uwDuty & 1 ? 1 : 14);
}
/* USER CODE END 4 */
|
|||||||||
|
実行すると以下のような波形が発生します。 正しく動作していることがわかります。 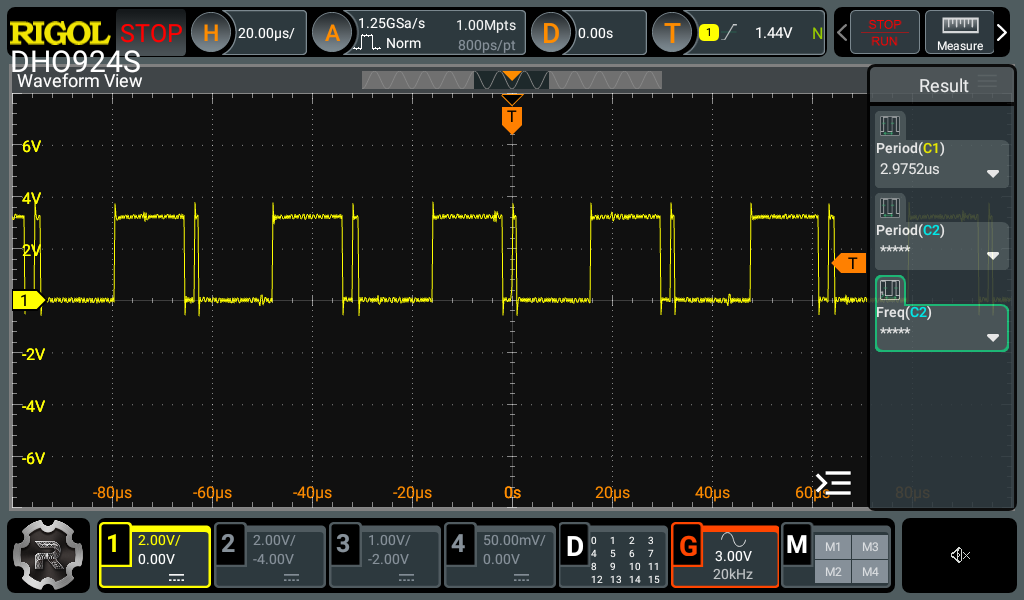 PWMで割込みを使用する場合はTIM_IT_UPDATEを使用したほうが良いかもしれません。 |